Spider Sensors
Friday, September 2nd, 2022
These little buddies went to SiliCon, I call them Spider Sensors (even though they don’t sense too much at the moment). They use Raspberry Pi Pico’s. Thanks for including them Matt.
These little buddies went to SiliCon, I call them Spider Sensors (even though they don’t sense too much at the moment). They use Raspberry Pi Pico’s. Thanks for including them Matt.
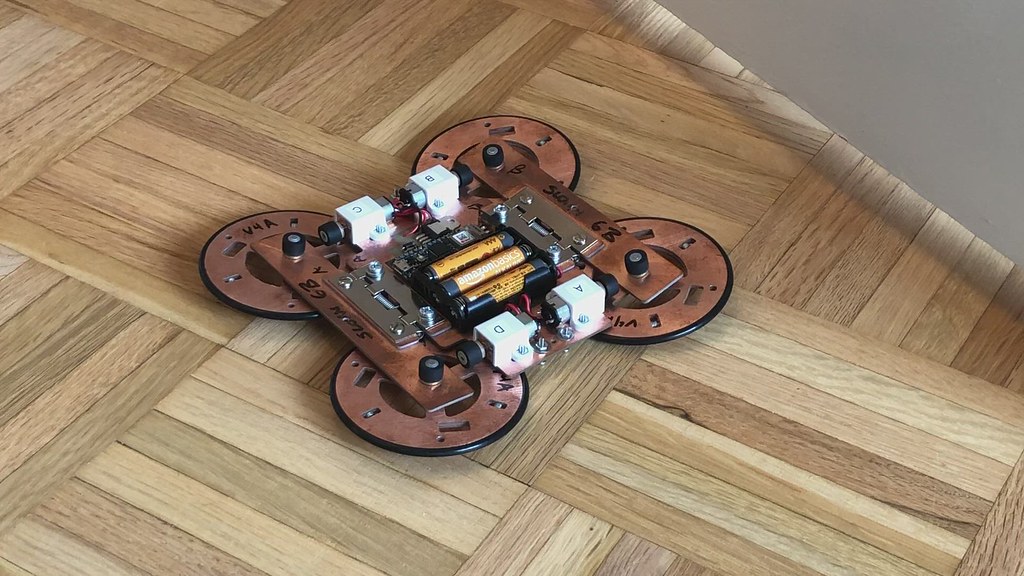
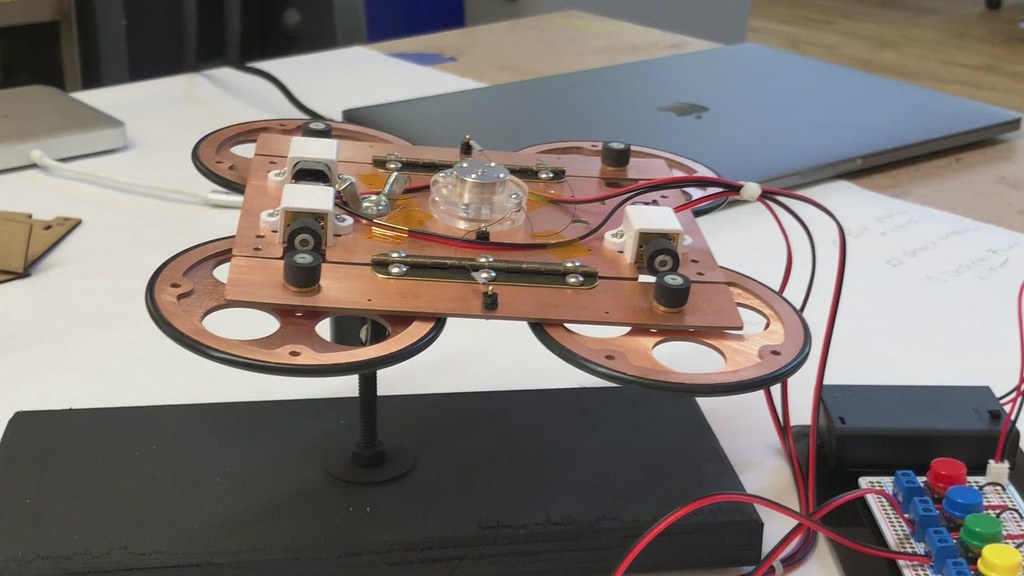
The prototype is assembled and functional!
So many improvements need to be made: it needs to be flatter, more responsive, more durable. But I’m very happy with how it turned out.
My original design brief: I have a desire to make a motorized “car” that can be as flat as possible. I want it to slide under a door, flip open, and drive away. I have a very cinematic vision in mind, I see a spy, or cat burglar, or techno supervillain using it. Not that I want it to be used for nefarious purposes, it’s just something stuck in my head, so I’m going to make it.

The car is now functional and fully assembled!

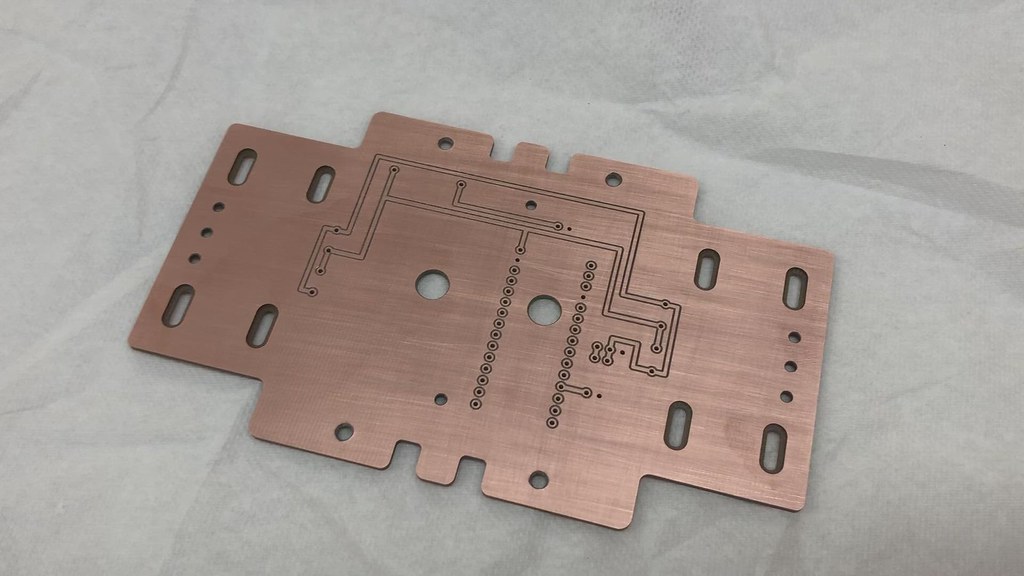
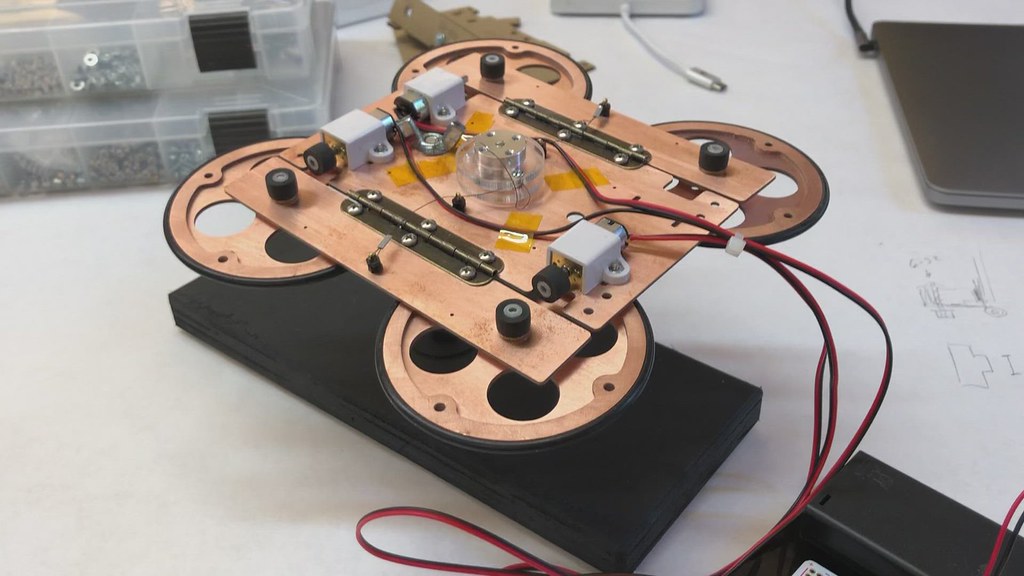
One of the main advantages of using FR-1 as the main material for the car body is it could also be the primary circuit board for all of the electronics.

I figured sliding under the door was going to be the easiest problem to solve, so I saved it for last. I tried using a bunch of different types of caster and roller balls. They worked great but ended up being too bulky and unnecessary.
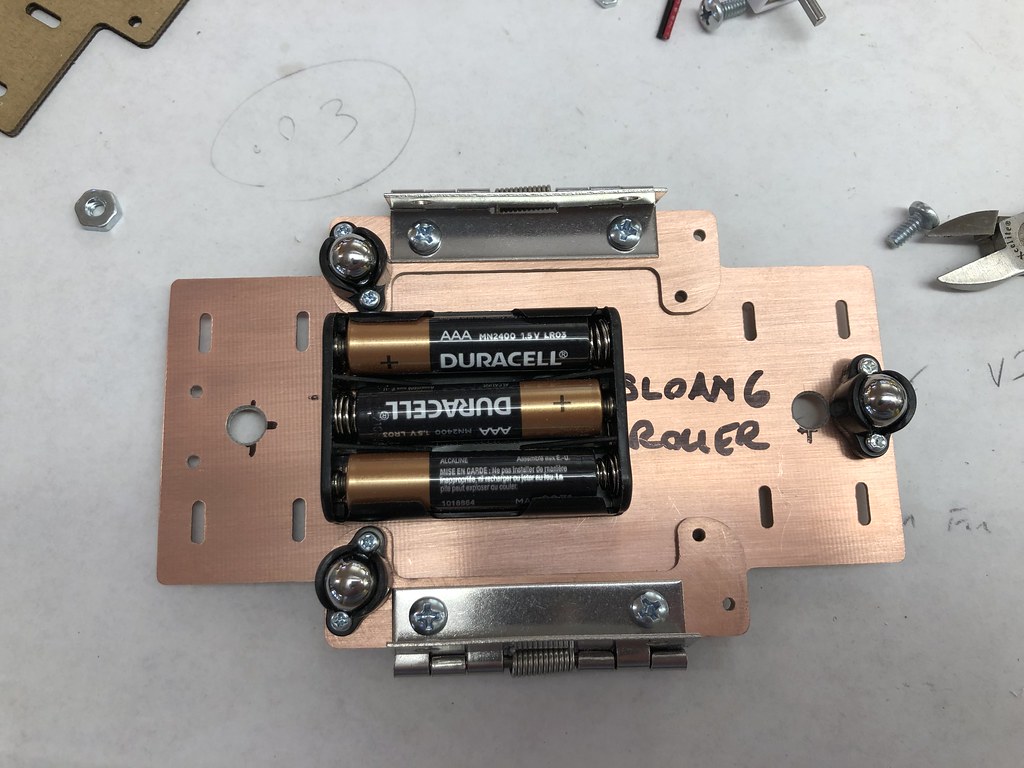
When the wheels are flattened, I have the car resting on 4 small screw heads. It slides just fine.
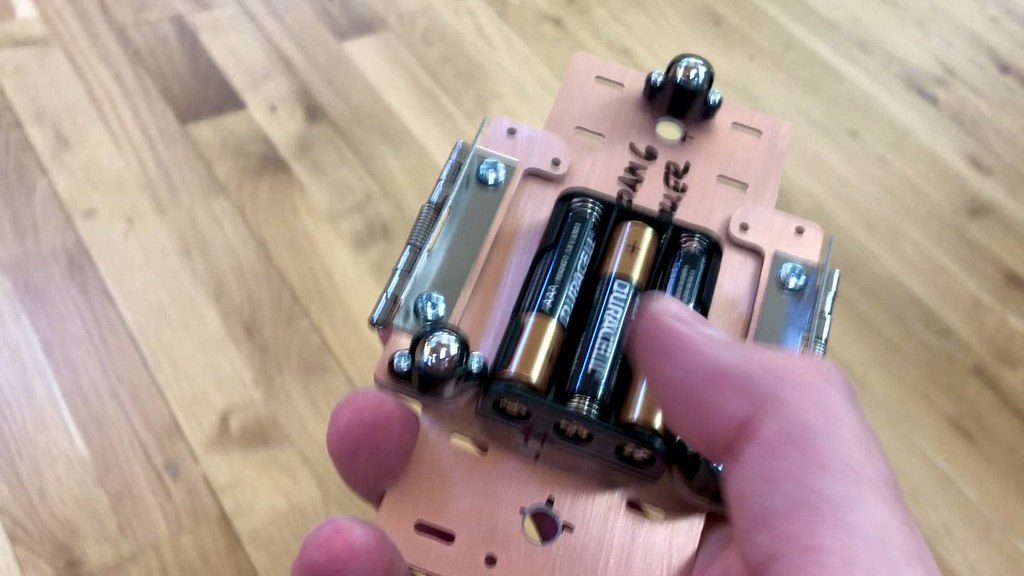
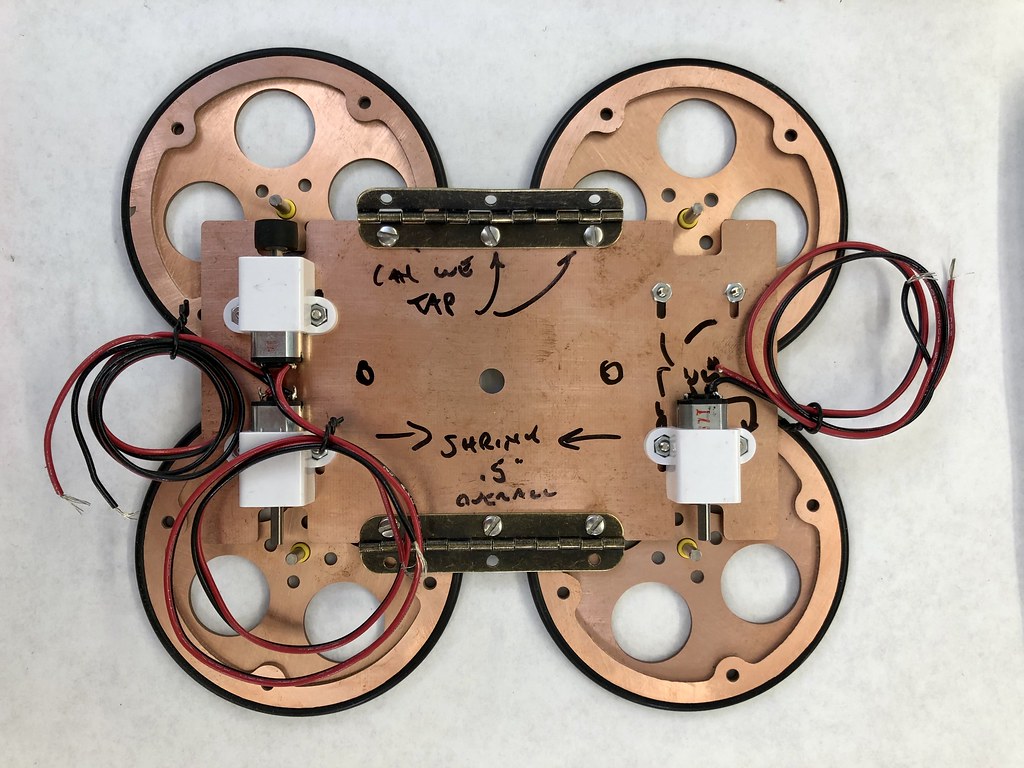
I redesigned the flip mechanism. Meet “the Sloan”.

After discussing some possible designs with my friend Sloan, we came up with a release lever concept.
The hinges were replaced with spring load hinges.

And each motor has a release lever that locks into a new wheel design. When the motors turn, the lever is released.

More to come.
Moving right along. I built a flip up mechanism using an RC kit (Du-Bro Micro Pull-Pull System). The kit is fantastic, but I don’t love my design. I’ll redesign later, but it’s fine for now. I’ve tested the friction drive for the wheels, looks good. Even soldered up a protoboard to test the motors.
This flip up design is too complicated and heavy and takes up valuable space in the middle of the car. I need something simpler.

More to come.
Some progress. The latest Flat Car prototype, I’ve named “Big A”, has mounted motors, has wheels that flip up, hinges, and I even built a base to keep it off of the bench.

Big A’s entire body is made out of FR-1, love this stuff.

I still need to figure out the mechanics of the flipping movement.

More to come.
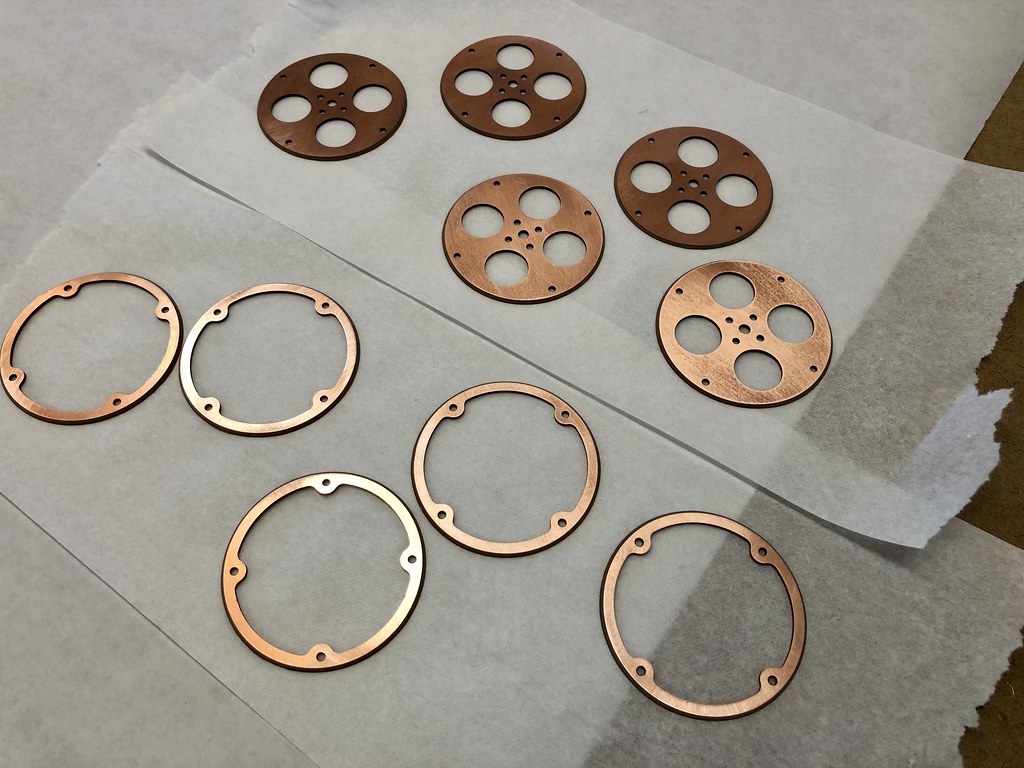
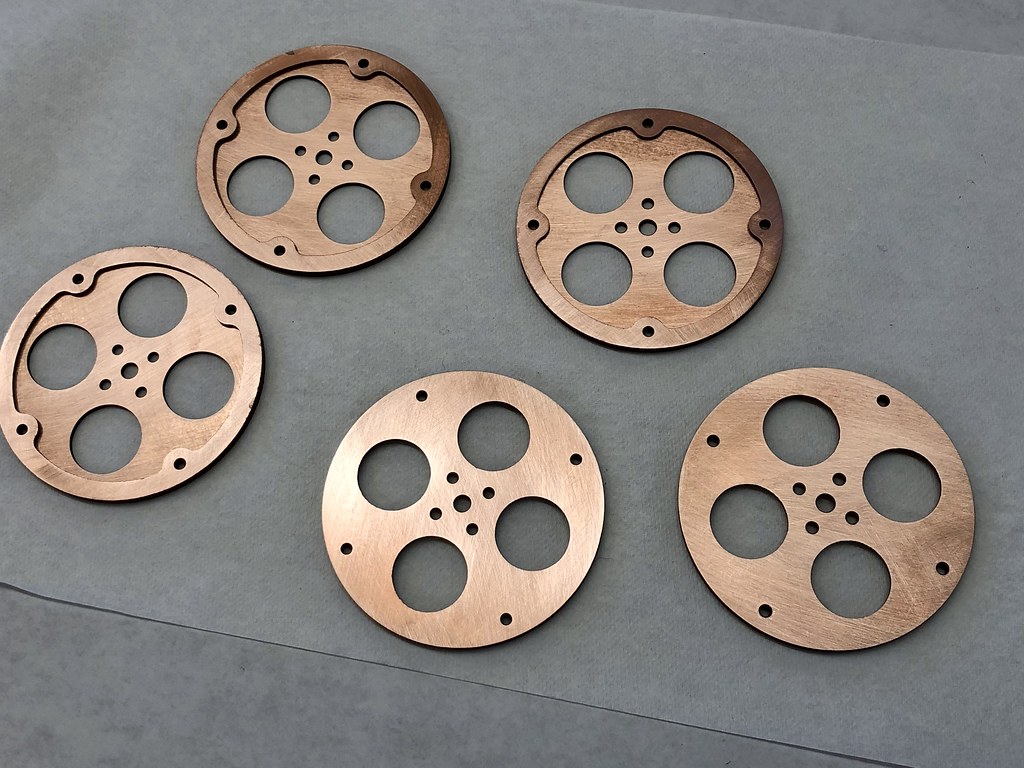
The wheels are going to be an important part to the flat car. Wheel V1 is made of two flat pieces, each with a chamfer, glued together. The chamfers make a nice spot for an O-ring to sit.
I used FR-1, typically used for making circuit boards, as the material for the wheel prototypes. I’m really happy with how the material worked out, easy to mill and very rigid. And it can even be tapped!
More to come.
I decided to go with N20 DC motors for the Flat Car. They are not as thin as I would like, but they are strong and readily available and I need to start somewhere.

I put a friction wheel on the motor and wheel axel. The hinged flip up motion brings the spindle in to contact with the wheel axel and the wheel turns.
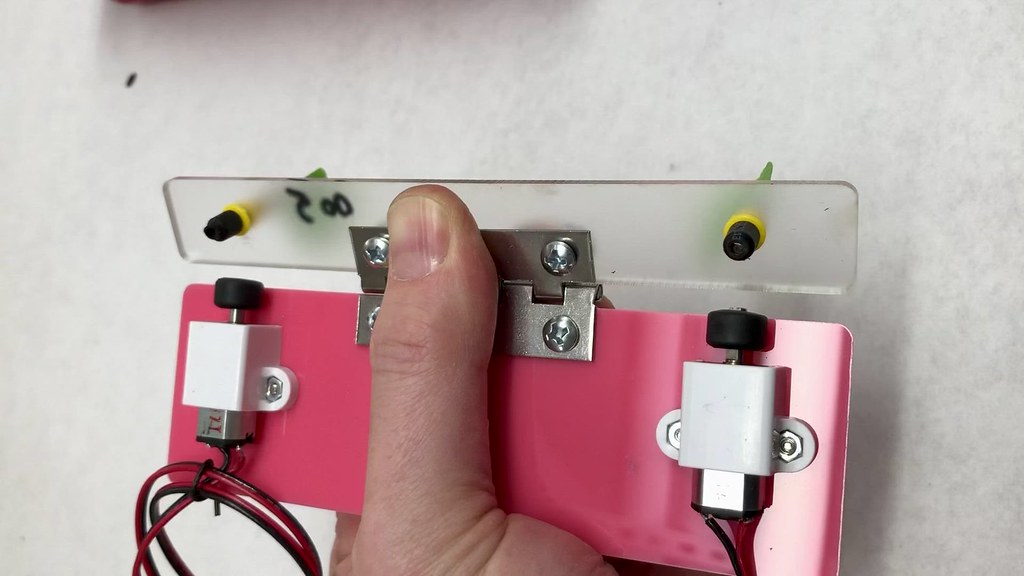

I ended up using pinch rollers for the friction drive. These pinch rollers are usually used in tape recorders. More to come.